


Сабз Tabletop худкор собит мошини винт Мошинҳои китф ба-китф


Параметри дастгоҳ
| Модели | GR-DL06 |
| Вазн (KG) | 400 |
| Номи бренд | САБЗ |
| Видеои санҷиши баромад | Таъмин карда шудааст |
| Андоза (L*W*H) | 860*603*710MM |
| Саноати татбиқшаванда | Телефонҳои мобилӣ, саноати электронӣ, саноати автоматӣ, модули камера |
| Қувва | 1,2 кВт |
| таъмини нерӯ | 0AC220V,50HZ |
| Як винтро барои вақт қулф кунед | Тақрибан 1-15 сония |
| Бурдаҳои татбиқшаванда | M1-M6.0 |
| Функсияи ҳушдор | Қулфҳои шинокунанда, дандонҳои лағжиш, қуфлҳои пошида |
| Ҳолати намоиш | Қуттии таълимии LED |
| сигналҳои I, O | 12 Дар мебарорад, 12 мебарорад |
| Ҳолати сабти барнома | 99 гурӯҳ |
| Навъи мотор | Мотори қадам |
Хусусиятҳои дастгоҳ
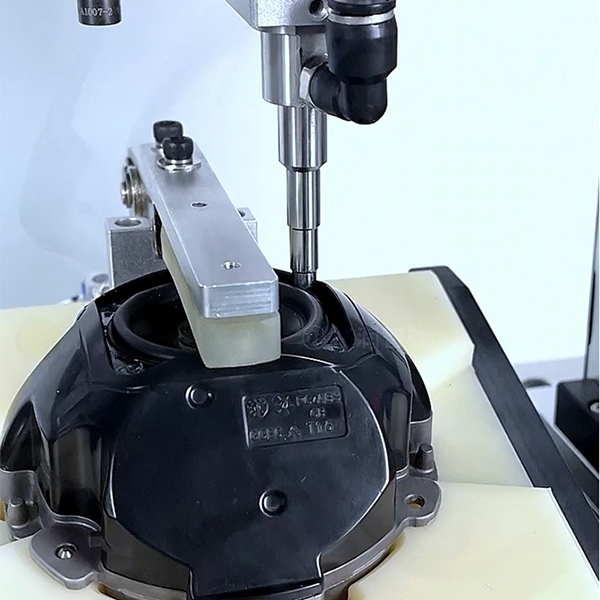
1. Таҷҳизот қабул китф-ба-китфи дукарата Z-меҳвари тарҳи, як метавонад ду мошини боло, таҷҳизот дорои versatility қавӣ, андозаи хурд, метавонад бо амалиёти хати истеҳсолӣ ҳамкорӣ, ва қулай барои иваз кардани маҳсулот аст.
2. Дастгоҳ метавонад 99 барномаи амалиётиро нигоҳ дорад.
3. Дарачаи баланди автоматикунонй ва кори оддй.
4. Мошини экипажи автоматии чангкашак, ки барои иддаоҳои хурдтар хеле мувофиқ аст. Барои таносуби дарозӣ ба диаметри винт ҳеҷ гуна талабот вуҷуд надорад.
5. Таҷҳизот меҳвари дукаратаи Y ва тарҳи меҳвари дукаратаи Z-ро қабул мекунад ва таҷҳизот метавонад винтҳои ду маҳсулоти якхеларо дар як вақт баста, шиддатнокии меҳнатро коҳиш диҳад ва самаранокии истеҳсолотро беҳтар созад.
6. Вақте ки дастгирии дастгоҳ ноком мешавад, ҳолати такрорӣ ё гузаришро интихоб кунед.
7. Барномаи кори хаттии таҷҳизот метавонад нусхабардории нуқта ба нуқта, блок-ба-блокро бо нусхабардории массиви минтақавӣ, нусхабардории платформа, таҳрири партия, амалиёти якқадам ва ғайра иҷро кунад. Хусусиятҳо, вақти барномасозиро кӯтоҳ кардан ва омӯхтан осон.
8. Пас аз таҳрир кардани параметрҳои амал, параметрҳои амал тавассути бандари силсилавӣ ба контроллер бор карда мешаванд, ки онро мустақилона офлайн иҷро кардан мумкин аст ё параметрҳои амалро дар қуттии дастӣ захира кардан мумкин аст. Занг задан осон.
9. Таҷҳизот гардонандаи мотории қадами дақиқ ва алгоритми назорати ҳаракатро барои самаранок беҳтар кардани дақиқии ҷойгиркунии ҳаракат ва такроршаванда қабул мекунад.
10. Танзими моменти осон барои таъмини сифати қулф.
11. Таҷҳизот бо партияи барқии servo муҷаҳҳаз аст, партияи барқии servo дорои назорати моменти дақиқи баланд дорад, дақиқии моменти момент ба 土3%-=5% мерасад, партияи барқии servo як қатор вазифаҳои пурзӯркуниро дастгирӣ мекунад, Ҳар як вазифа як қатор қадамҳои пурқувватро дастгирӣ мекунад.
12. Таҷҳизот бо панҷараи муҳофизати бехатарӣ муҷаҳҳаз шудааст, то бехатарии операторонро самаранок муҳофизат кунад.
Тафсилот


Категорияҳои маҳсулот
-

Навъи сабзи ошёнаи шаш меҳвари адсорбсияи дукарата ...
-

Мизи кории сабз чор-меҳвари адсорбсияи қулфи визуалӣ ...
-

Мошини автоматии бисёрфунксионалии роботи печдор ...
-

Мошини винти дақиқи собиткунандаи винт...
-

Робои муштараки шаш меҳвари дар ошёнаи сабз насбшуда ...
-

Мизи сабзи шаш меҳвари навъи адсорбсияи бозгашт ба...





