Шаш меҳвари муштараки роботи винт мошини пурзӯр

Параметри дастгоҳ
| Модели | GR-XFXZ950 |
| Дастрасии робот | 950мм |
| Сарбории охири робот | 16кг |
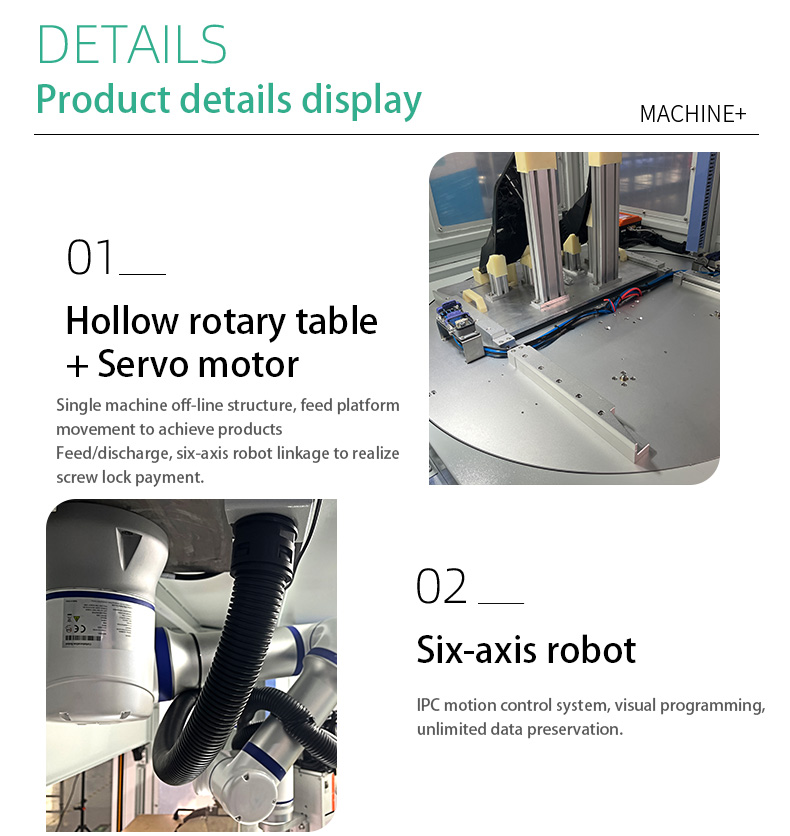
| Платформаи ғизо | Мизи гардиши марказии назорати + муҳаррики серво |
| Усули ғизо | Зарба/спират мувофиқанд |
| Ҳосили бастабандӣ | 99,95% |
| Таъмини қувваи корӣ | AC220V |
| Манбаи ҳавои корӣ | 0,4-0,7МПа |
| p ow er | Тақрибан 2,5 кВт |
| Усули координатаро таъин кунед | Ҷойгиркунии визуалӣ |
| Деменсияи беруна (L*W*H) | 1400*1900*1950мм |
| Вазн (KG) | 800 |
| Вазъият | Нав |
| Кафолати ҷузъҳои асосӣ | 2 сол |
Хусусиятҳои дастгоҳ
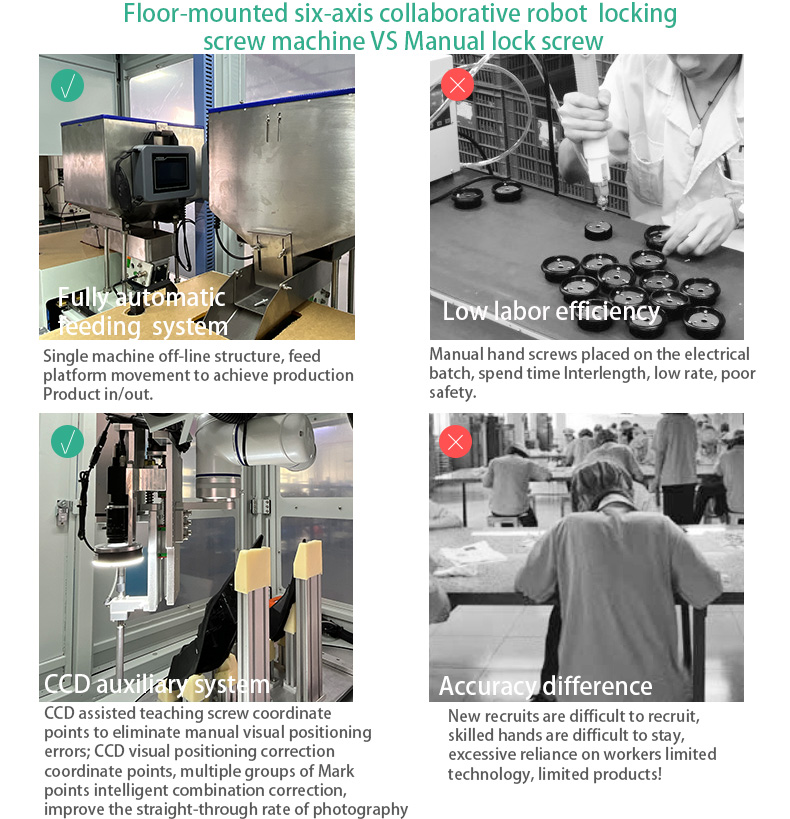
1.Сохтори як мошини оф-line, ҳаракати платформаи ғизо барои ноил шудан ба воридот / баромади маҳсулот, пайванди роботи шаш меҳвар барои ноил шудан ба пардохти қулфи буриш
2.IPC системаи назорати ҳаракат, барномасозии визуалӣ, нигоҳдории маълумот номаҳдуди;
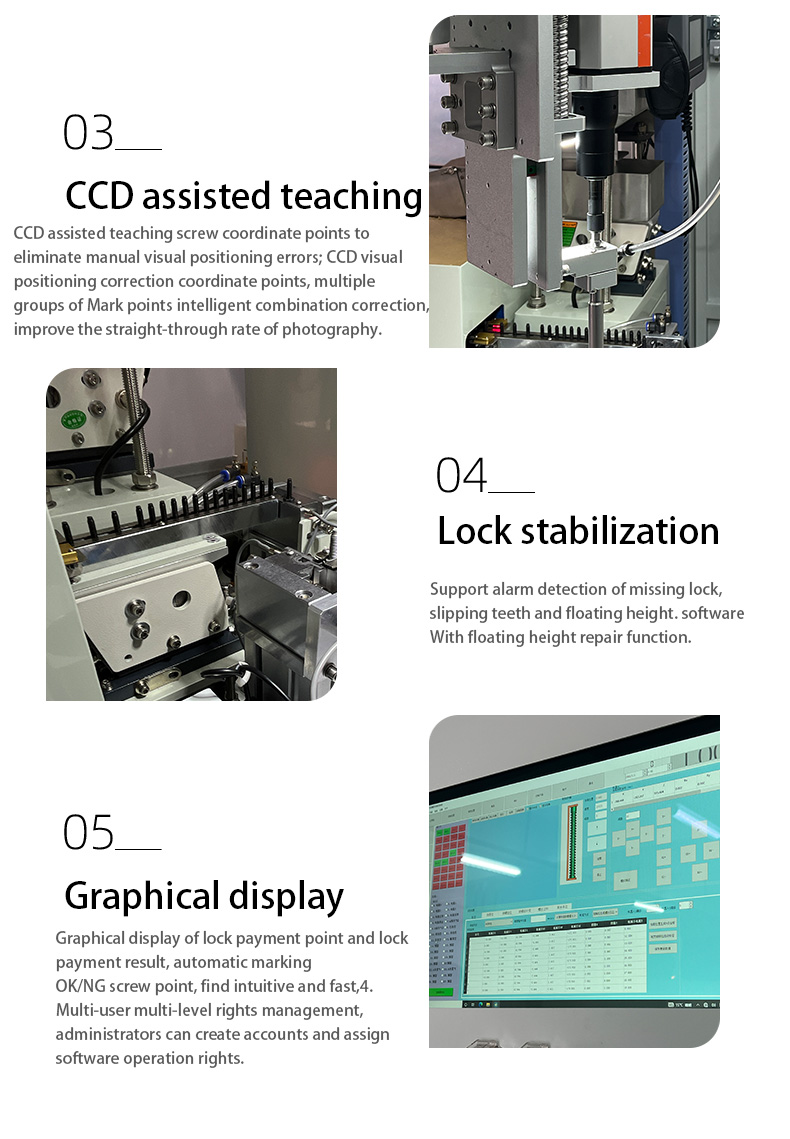
3.Ба таври графикӣ нишон додани нуқтаи пардохти қулфи қулф ва натиҷаи пардохти қулф, ба таври худкор нуқтаи буриши OK/NG-ро қайд кунед, беихтиёрона ва зуд пайдо кунед;
4.. Идоракунии ҳуқуқҳои бисёркорбар ва бисёрсатҳи, маъмурон метавонанд ҳисобҳо эҷод кунанд ва ҳуқуқи амалиёти нармафзорро таъин кунанд
5.CCD бо кӯмаки таълим додани нуқтаҳои координатаи винт барои бартараф кардани хатогиҳои мавқеъи визуалии дастӣ; Нуқтаҳои координатаи ислоҳи мавқеъи визуалии CCD, гурӯҳҳои сершумори нуқтаҳои Марк ислоҳи комбинатсияи интеллектуалӣ, беҳтар кардани суръати интиқоли аксҳо;
6.Support ҳушдор ошкор намудани қулфи гумшуда, дандон лағжиш ва шино баланд. Нармафзор бо функсияи таъмири баландии шинокунанда меояд;
7.Z-меҳвари метавонад бо сенсори ҷобаҷогузории лазерӣ (барои чен кардани баландии шинокунанда) ва санҷандаро ошкор кардани фишор (ихтиёрӣ);
8.Дар партияи барқ метавонад бо партияи барқ HIOS, Qili суръати партияи барқ, партияи барқ servo, партияи барқ соҳибақл ва ғайра муҷаҳҳаз (ихтиёрӣ);
9.Таҷҳизот метавонад MES-ро мувофиқи талаботи муштарӣ, аз қабили моменти, шумораи гардишҳо, кунҷ, каҷи момент, ҳолати қулф бор кунад.
10.Сканкунии дастӣ ва сканкунии автоматиро интихоб кардан мумкин аст (ихтиёрӣ)
11.. Маълумоти истеҳсолиро метавон пайгирӣ кард ва нармафзор бо тахтаи назорати сифат меояд. Ҳама намуди маълумотро бор кардан ва зеркашӣ кардан мумкин аст (ихтиёрӣ);
12. Санҷиши автоматии нуқтаи моменти момент, захира кардани натиҷаҳои санҷиши моменти момент ва пурсиш (ихтиёрӣ).

Тафсилот