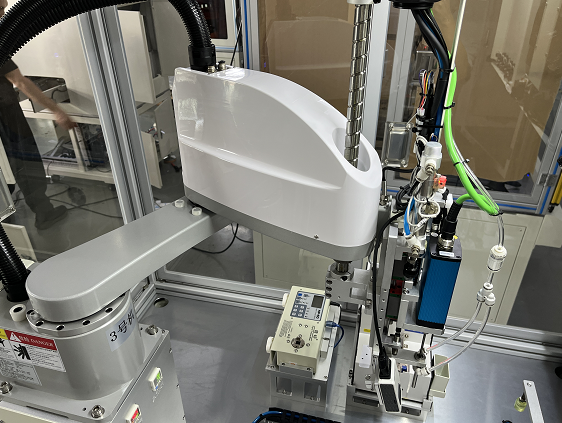
Чор-меҳвари робот Adsorbtion Навъи винт мошини пурзӯр

Параметри дастгоҳ
| адад | Мушаххасоти |
| Модели | GR-XFSZ600/GR-XFSZ800 |
| Дастрасии робот | 600мм/800мм |
| Номи бренд | САБЗ |
| Калидвожаҳо | винти мошин |
| Зарбаи чоҳи ғизо | 500мм/800мм |
| Андоза (L*W*H) | 1300*1000*1950мм/1500*1200*1950мм |
| Иқтидори нигаҳдории барнома | 0-1200 мм/с |
| Суръати ҳаракати меҳвар | 999 гурӯҳ |
| Самаранокии басташавӣ | як мехи печдор тақрибан 2.0-2.5S аст |
| Ҳосили бастабандӣ | 99,98% |
| Таъмини қувваи корӣ | AC220V |
| Манбаи ҳавои корӣ | 0,4-0,7МПа |
| кувва | Тақрибан 1,5 кВт |
Хусусиятҳои дастгоҳ
1.Сохтори мустақили офлайнӣ, платформаи ғизодиҳӣ барои амалӣ кардани ғизо/боркунии маҳсулот ҳаракат мекунад ва пайвасти чор меҳвари робот қулфкунии винтро амалӣ мекунад
2.Системаи назорати ҳаракати IPC, барномасозии визуалӣ, сарфаи номаҳдуди маълумот;
3.Намоиши графикии нуқтаҳои қулфкунӣ ва натиҷаҳои қулфкунӣ, аломатгузории худкори нуқтаҳои буриши OK/NG, ҷустуҷӯи беихтиёрона ва зуд;
4.Истифодабарандаи бисёрсатҳа, идоракунии иҷозатҳои бисёрсатҳи, маъмурон метавонанд ҳисобҳои нав эҷод кунанд ва иҷозатҳои амалиёти нармафзорро таъин кунанд
5.Нуктаҳои координатаҳои винтӣ бо ёрии CCD барои бартараф кардани хатогиҳои дастӣ оид ба мавқеъи визуалӣ; Нуқтаҳои координатаи ислоҳи мавқеъи визуалии CCD, ислоҳи маҷмӯии интеллектуалии гурӯҳҳои сершумори нуқтаҳои Марк, Беҳтар кардани суръати интиқоли аввалини аксбардорӣ;
6.Support ошкор ҳушдор ба монанди қулфи leaky, дандон sliding, шино ва on.The нармафзор меояд, ки бо функсияи таъмири баландии шинокунанда меояд;
7.7.Z-меҳвари метавонад бо сенсори ҷобаҷогузории лазерӣ (ченкунии баландии шинокунанда), сенсори муайянкунии фишор (ихтиёрӣ);
8.Дар партияи барқ метавонад бо партияи барқ HIOS, Qili суръати партияи барқ, servo барқ партияи, партияи барқ соҳибақл ва ғайра муҷаҳҳаз (ихтиёрӣ);
9.Таҷҳизот метавонад MES-ро мувофиқи эҳтиёҷоти муштарӣ бор кунад, ба монанди момент, шумораи гардишҳо, кунҷ, диаграммаи каҷи моменти ва ҳолати қулф.
10.Сканкунии коди дастӣ ва сканкунии автоматии кодро интихоб кардан мумкин аст (ихтиёрӣ)
11.Маълумоти истеҳсолиро пайгирӣ кардан мумкин аст ва нармафзор бо назорати сифат kanban меояд. Ҳама намуди маълумотро бор кардан ва зеркашӣ кардан мумкин аст (ихтиёрӣ); 12. Санҷиши нуқтаи моменти автоматӣ, захира кардани натиҷаҳои санҷиши моменти момент ва метавонад дархост кунад (ихтиёрӣ).
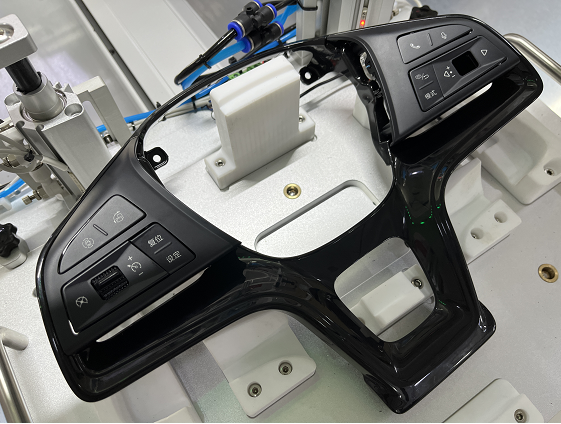
Намоиши тафсилот